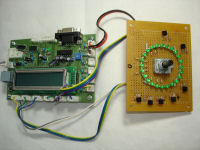
転車台の操作部を作りました。基板は転車台本体の制御部と同じものを使用しましたので、これもオーバースペックです。
写真の右側基板上で中央に回転を指示するためのロータリーエンコーダー、回転指令位置と現在回転位置を表示するためのLEDがあります。
転車台本体の基板と本基板はCANにより通信しています。

2013年9月完成しました。ご声援ありがとうございました。
転車台の操作部を作りました。基板は転車台本体の制御部と同じものを使用しましたので、これもオーバースペックです。
写真の右側基板上で中央に回転を指示するためのロータリーエンコーダー、回転指令位置と現在回転位置を表示するためのLEDがあります。
転車台本体の基板と本基板はCANにより通信しています。
転車台ピット
転車台のピットは前回説明したように、POMの円盤の上部を旋盤で切削して作りました。このときピット周囲にある円周のレールも切削で凸状にしました。転車台の下部に取り付けた車輪がこのレールの上を転がり、転車台上部から力が加わっても軸が変形しないようにしました。
転車台桁の製作
転車台は下路式とし、工作の簡単化のためKATOのガーダー橋を改造してつくりました。
ジオラマのベースに組み込んだものが下の写真です。
塗装について
転車台桁の塗装は市販の模型用塗料で問題ないのですが、ピットはPOMですので、塗装がしづらいとの情報がありましたが、ピットの表面を#250程度のサンドペーパーで傷をつけた後、タミヤのグレーのサーフェイサーを吹きつけると強固な塗膜が得られました。
そのあとピットと転車台桁のウェザリングを行いました。

転車台の構想がまとまってきましたので、設計と製作を同時進行で取り掛かかります。
いろいろ試行錯誤しながら作りましたので、製作途中の写真がありませんが、お許しください。
ベース盤
円形のベース盤は白色のPOM板から旋盤で削り出しました。中心にはベアリング用のΦ17の穴をあけています。
転車台の下の車輪が乗るレールは上記旋盤作業で削りだしましたので枕木等は省略です。ベース盤の厚みは11mmとしました。そりが心配なのと、モータ等の取り付けが必要ですので、1mm厚の鉄の円盤を裏から固定できるようにしました。
駆動装置
モータはギヤードステッピングモータ、その軸にモジュール0.5、歯数15の真鍮製、平歯車、転車台駆動軸にはモジュール0.5、歯数120のポリアセタール製、平歯車を使用しました。
駆動軸はベース盤のベアリングともう1箇所のベアリング(下の写真の黒い樹脂の中に入っています)で支持しています。

下の写真は転車台をジオラマのベースに下側から組み込んでねじ止めしたところです。メンテナンスのために取り外し可能としています。


転車台を作るとき、まず考えるのが
1.位置決め
2.駆動装置
3.ジオラマへの設置方法
をどうするかということではないでしょうか。
回転体の位置検出といえば...
1.の位置決めについては、資金と設置スペースが許せばロータリーエンコーダーを使用して転車台の回転角度を検出すれば、解決できるとは思いますが、「おもちゃ」としての位置づけではちょっとレベルが高いかと思いました。(「大人のおもちゃ」と考えれば導入も可能かも知れません。)
簡易版の位置検出は?
次に考えたのがセンサーによって位置決めを行なうことです。機械的なスイッチ等による位置検出では検出誤差が大きくなると思われますので、電気的に位置検出できればよいのではと思いました。
赤外発光ダイオードとフォトトランジスタの組合せで、一方をベースに取り付け、もう一方を転車台に取り付けて、細穴を介して光を検出すれば実現できそうです。しかしながら停止位置が多くなるとセンサーの数が増えてきますので、一工夫要りそうです。(下の写真で円盤の周囲に取り付けてあるのがフォトトランジスタです。)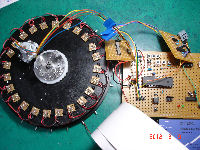
位置検出器なしで実現できないか?
次に考えたのが、ステッピングモータによってあらかじめ設定したステップ数で回転停止すれば、任意の位置で転車台を止められるのではということです。
しかしながら、バックラッシの影響で右回転、左回転の停止位置が微妙に異なる可能性は否定できません。(やってみる価値はあります。)
大阪の日本橋の電子部品屋さんで格安のギヤードステッピングモータ(SPG20-332)が売られていましたので、それを買って試験することにしました。実際に組み込んだ状態は上の写真です(位置検出器は組み込んだままです)。

ジオラマへの設置方法は
転車台ばかりに時間を費やすと、ジオラマの完成がいつになるか分からないので、そこそこの完成度で妥協して、その後改良したときには転車台を取り替えることができるように、ジオラマの裏側から取り外し可能としました。